
Ren Zeyu
Short Biography
Zeyu Ren is currently a Mechatronics Engineer in the R&D Center at Rokae Robotics. His research interests include under-actuated hands, tendon-driven mechanism, series elastic actuators and mechatronics design. In 2019, he received his Ph.D degree in Robotics from Italian Institute of Technology under the supervision of Dr. Nikos G. Tsagarakis. His bachelor degree was obtained in Mechatronics Engineering from Zhejiang University in 2015.
Abstract, Presentation Replay
We present the development, modeling, and control of a three-degree-of-freedom compliantly actuated leg called the eLeg, which employs both series- and parallel-elastic actuation as well as a bio-inspired biarticular tendon. The leg can be reconfigured to use three distinct actuation configurations, to directly compare with a state-of-the-art series-elastic actuation scheme. Critical actuation design parameters are derived through optimization. A rigorous modeling approach is presented using the concept of power flows, which are also used to demonstrate the ability to transfer mechanical power between ankle and knee joints using the biarticular tendon. The design principles and control strategies were verified both in simulation and experiment. Notably, the experimental data demonstrate significant improvements of 65–75% in electrical energy consumption compared with a state-of-the-art series-elastic actuator configuration.
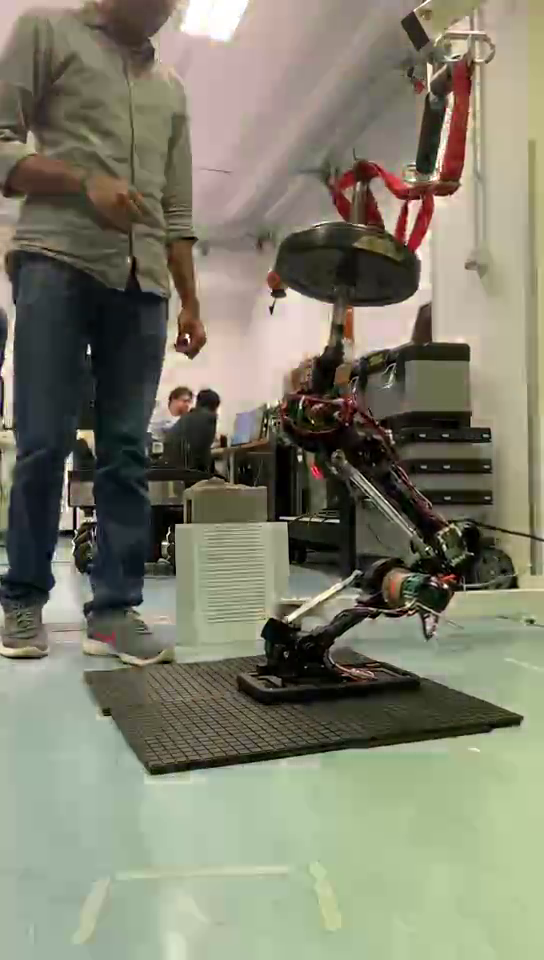
| Design Overview | Experiment with 20Kg load |
|---|---|
 |
 |