
Patrick Wensing
Short Biography
Patrick Wensing is an Assistant Professor in the Department of Aerospace and Mechanical Engineering at the University of Notre Dame where he directs the Robotics, Optimization, and Assistive Mobility (ROAM) lab. He received his Ph.D. in Electrical and Computer Engineering from The Ohio State University in 2014 and completed Postdoctoral training at MIT in 2017. He currently serves as an Associate Editor for the IEEE Transactions on Robotics and as a Co-Chair for the IEEE Robotics and Automation Society Technical Committee on Model-Based Optimization in Robotics.
Abstract, Presentation Replay
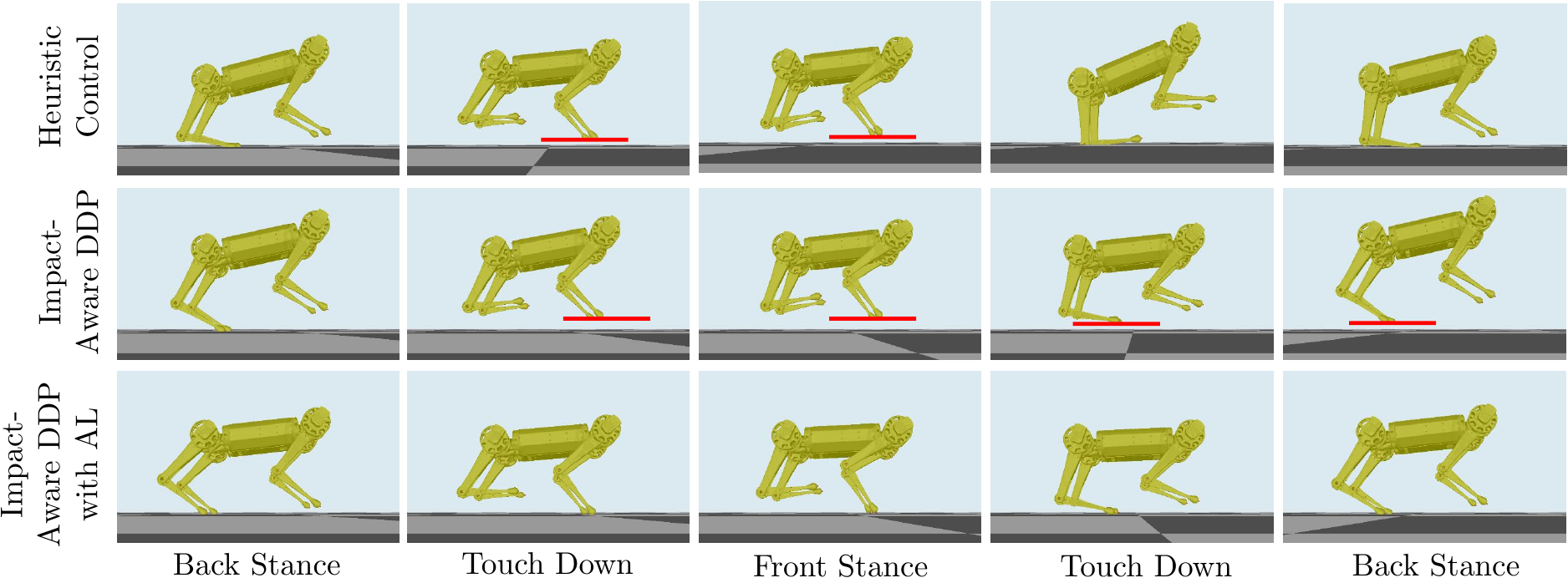
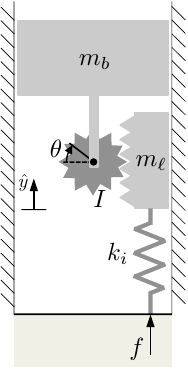
When it comes to our next-generation robots operating in uncertain environments and around uncertain humans, unplanned contacts will be inevitable. Yet, even for the contacts that our robots plan to make, managing contact transitions remains a critical focus to ensure success in the tasks our robots are intended to fulfill. In this talk, I’ll attempt to make my case for the central role that considerations of contact must play in both the design of our robots and the control laws that guide them. The talk will begin with a discussion of actuator design with a first-principles analysis to highlight the importance of transparency in the actuator transmission systems for legged robots. I’ll then discuss new perspectives on the concurrent design and control of these systems, where we treat problems in tandem to ensure synergy between their solutions. Finally, the talk will conclude with a discussion of strategies for online replanning of impacts during model predictive control using a new hybrid-systems trajectory optimization approach based on differential dynamic programming. Overall, these developments demonstrate that the optimization of impact-aware robots isn’t squarely a design problem and it isn’t squarely a control problem; it all matters, and it is how the solutions to these problems come together that ultimately determines the capabilities of our robots.
| Impact-aware online replanning | Actuator transmission model |
|---|---|
 |
 |